
ダビンチ ・ロボット手術とは
ダビンチ ・システム(Intuitive Surgical社製 Da Vinci Surgical System)は、腹腔鏡手術を支援する、内視鏡下手術支援ロボットです。患者さんのお腹にあけた小さな穴に手術器具を取り付けたロボットアームと 内視鏡を挿入し、医師がサージョンコンソールと呼ばれる操作ボックスの中で内視鏡画像を見ながらロボットを操作します。

ロボット手術のメリット
低侵襲性
- より小さい創口
お腹や胸を切る手術(開腹手術、開胸手術)では大きな手術あとが残ってしまいました。また、手術によってはろっ骨を切る必要があったため強い痛みがありました。しかし、ダビンチ ・システムによる手術では、鉗子を挿入する小さな穴を数か所開けるだけです。手術あともほとんど目立たず、術後の痛みも軽くなります。 - より少ない出血量
炭酸ガスで腹腔内を膨らませる(気腹)ために、従来の開腹手術に比べて出血が少なくなります。
機能性
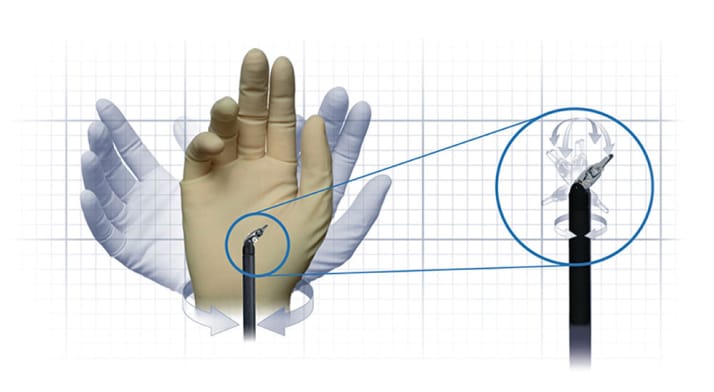
- 従来の腹腔鏡手術では手元の動きと鉗子の動きは逆方向でしたが、ロボット手術では同方向への自然な動きが可能です。術者の手ぶれも防止されるほか、ロボットにしかできない動き(関節の360°回転など)もできます。このため口の中やお腹の奥、骨盤の中などの狭い空間でも、スムーズかつ込み入った動作が可能です。
確実性(根治性)
ダビンチ ・システムでは3次元立体画像を見ながら手術ができます。また、拡大視野(肉眼の10~15倍)でカメラ自体も術者が自在に操作できます。まるで患者さんの体内に入りこんで手術をしているように、人の目より自由に見たいところを見ることができます。がんの手術であれば、がんの周囲に適切な距離をつけて切除でき、今まで以上に完全に切除できる可能性が高まります。
ロボット手術にはデメリットもあります
ロボット手術のデメリットは、「手術機器で触れた感触がわからないこと」「トラブルが起きた時の対処には、豊富な手術経験が必要であること」などです。
当院では、万が一のトラブルにも迅速な対処ができるように、執刀医、助手だけでなく、手術室のスタッフの教育体制を整えております。また複数診療科・多職種で情報共有を行う場を設けており、より安全な手術を提供できるよう取り組んでいます。
ロボット手術の適応・対象疾患
今日のがんの手術においては、根治性(=がんを確実に取り除くこと)と共に、きずが小さい、出血が少ないなどの低侵襲性(=身体への負担が少ないこと)が重要と考えられています。手術支援ロボットの出現は大きな進歩であり、多くの病気がその対象となりました。
当院では、2013年10月から内視鏡手術支援ロボット・ダビンチによる低侵襲手術を行っています。安全性や有効性など、患者さんへのベネフィット(利益)を確認しながら堅実に症例を積み重ねてまいりました。
ロボット手術件数の増加に応じて、2018年11月には埼玉県内で初となる2台体制、2023年7月には3台体制となりました。対象となる疾患も増え、2024年1月時点では、泌尿器科のがん(前立腺がん、腎がん、腎盂・尿管がん、膀胱がん)、消化器のがん(胃がん、直腸がん、結腸がん、膵臓がんや胆管がん、肝がん)、頭頸部のがん(中咽頭がん、下咽頭がん、喉頭がん)のなどの悪性腫瘍、骨盤臓器脱(子宮脱、膀胱瘤、直腸瘤、腟断端脱など)や婦人科良性腫瘍(子宮筋腫や子宮腺筋症、子宮頸部高度異形成など)に対する手術や成人のそけいヘルニア手術をおこなっています。なお、そけいヘルニアの手術は先進医療への取り組みとしておこなっているもので、現時点では健康保険未収載(自費診療)となります。
ロボット手術を受けるには?
手術を受けるには、(かかりつけ医の紹介状をご持参のうえ) 各科に受診、担当医へご相談いただくことになります。
当日の診察の流れについては来院・入院についてをご参考ください。
※症例によってはダビンチ手術の適応外となる場合もありますがご了承ください。
ダビンチSP
当院では、2023年7月に手術支援ロボットの最新機種(※)「ダビンチSPサージカルシステム(以下、ダビンチSP)」を、関東で初めて導入しました。
従来の手術支援ロボットとの大きな違いは、1本のアームから屈曲するカメラと複数のインストゥルメント(鉗子)を操作するシングルポート(単孔式)システムにあります。従来のマルチポートシステムでは複数ヵ所必要となる切開創(手術のきず)を1つに減らすことで、従来のロボット支援手術のメリットはそのままに、より低侵襲(身体への負担や痛みの軽減)かつ整容性(傷あとなどの美容面)に優れた手術を実現できます。
従来機種(ダビンチXi)との違い
| ダビンチSP | ダビンチXi | |
|---|---|---|
| アーム | シングルポート(単孔式) | マルチポート(多孔式) |
| 切開創 | 1~2か所 | 5~6か所 |
| カメラ | 軟性鏡(関節機能があるため屈曲が可能)のため、角度・方向の自由度が高い。 | 硬性鏡(真っすぐなカメラ)のため、角度・方向はほぼ一定。どのアームにもカメラを接続できる。 |
ダビンチSPで手術ができる疾患
2024年6月時点で、当院では下記の手術をダビンチSPでおこなっています。
- 泌尿器科領域(前立腺がん、女性骨盤臓器脱)
- 肝胆膵外科領域(肝部分切除、解剖学的肝切除、膵体尾部切除)
- 頭頸部外科領域(中咽頭がん、下咽頭がん、声門上がん)
- 婦人科領域(子宮摘出手術)
がんの病期や臓器の形状、患者さんの体格などによっては、従来機種(ダビンチXi)の方が適している場合もあります。
当院にはロボット手術の経験豊富な医師が多く在籍しています。患者さんの病状を総合的に判断し、より適した手術方法を提案しています。
地域の皆さまに“より安全で質の高い医療”を届けるべく、これからも尽力して参ります。

予約方法
外来予約 受付窓口
| 受付窓口 | 上尾中央総合病院 病診連携室 |
|---|---|
| TEL | 048-773-5941 |
| 注意事項 |
※当日のご予約はお受けいたしかねます。 ※時間帯によって、電話回線が混み合ってつながりにくい場合があります。ご迷惑をおかけいたしますが、悪しからずご了承ください。 ※各医療機関の診療情報提供書(紹介状)をお持ち下さい。 ※診療情報提供書(紹介状)のない方は、病気ガイドに記載されている各診療科外来までお問い合わせ下さい。 |
交通案内
〒362-8588 埼玉県上尾市柏座1-10-10
外来受付のご案内
外来受付時間
診療開始時間
午前 9:00~ / 午後 14:00~
土曜日は午前のみ
当院の外来受診は原則予約制となります。ご了承ください。
診療科によって、受付時間が異なる場合があります。詳しくは外来担当医表をご確認下さい。
休診日
休診や予約制となっている診療科もございます。
ご来院前に外来担当医表をご確認下さい。